

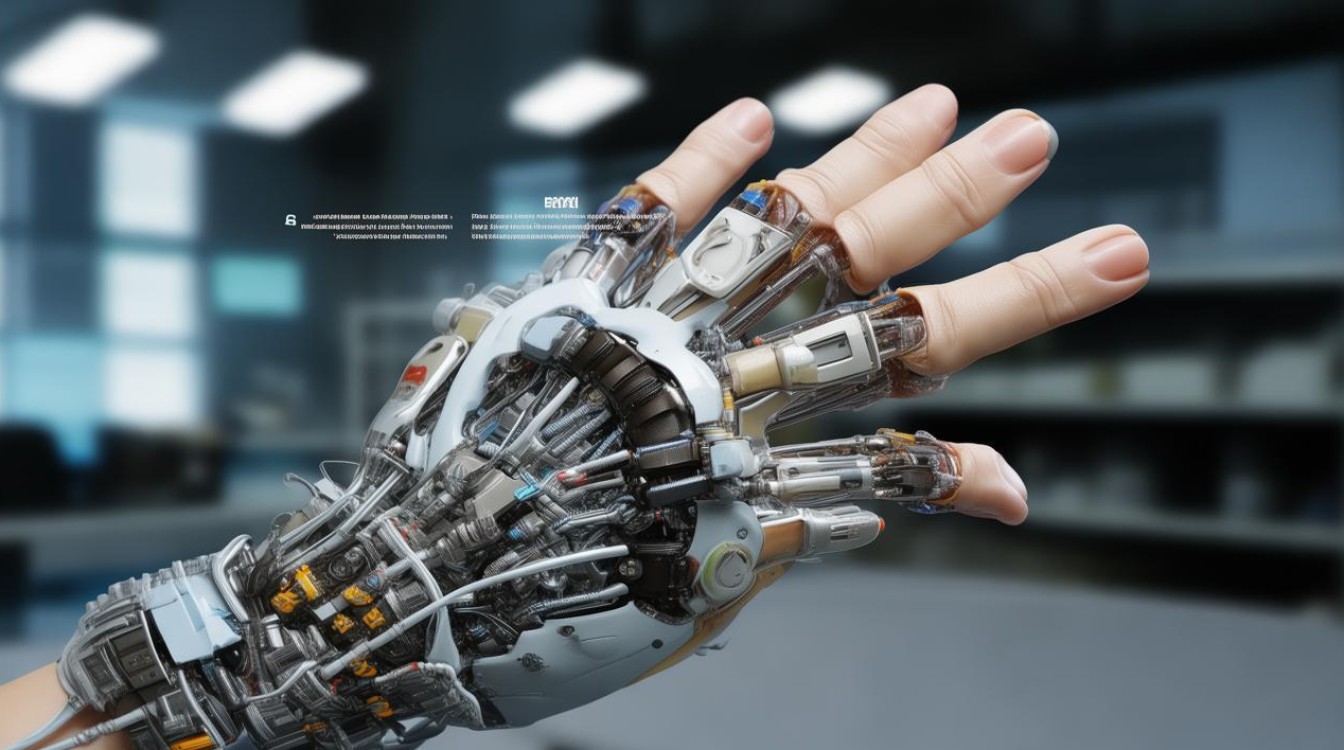
北大研发全触觉仿生手
开启触觉感知新纪元
研发背景与意义
在当今科技飞速发展的时代,仿生技术作为一门极具潜力的交叉学科领域,正不断为人类生活和社会进步带来新的可能,对于肢体残缺或受损的人群而言,传统假肢虽然在一定程度上恢复了部分肢体功能,但在触觉反馈这一关键层面却始终存在巨大短板,北京大学科研团队秉持着对前沿科技的探索精神以及人文关怀理念,投身于全触觉仿生手的研发工作,旨在打破这一技术瓶颈,为残障人士重塑完整、自然且精准的触觉体验,助力他们更好地融入日常生活与工作场景,重拾生活自理能力与自信,同时也有望在医疗康复、智能机器人等众多领域引发革新性变革。
研发团队与历程
(一)核心科研力量汇聚
北京大学集结了来自材料科学、机械工程、神经科学、电子信息等多学科领域的顶尖专家与青年才俊,组成了一支跨学科协同攻关的梦幻团队,这些学者带着各自深厚的学术积淀与前沿视野,从不同专业角度为全触觉仿生手的研发注入动力,确保项目在理论创新、技术研发、实验验证等各个环节都能得到全方位支撑。

(二)漫长研发征程
- 基础研究阶段([起始时间区间 1]):团队深入探究人体手部触觉感知机理,通过与医疗机构合作,获取大量手部神经信号传输、皮肤触觉感受器分布及响应机制等一手数据资料,同时在实验室模拟不同触觉场景,分析力学、电学、化学等多因素耦合作用下的触觉产生原理,为后续仿生设计奠定坚实理论根基。
- 原型设计与试验阶段([起始时间区间 2]):依据基础研究成果,科研人员着手设计仿生手的机械结构,采用新型柔性材料模拟人体皮肤弹性与纹理,精心布局压力、温度、湿度等多模态传感器,力求精准捕捉外界触觉信息,随后制作出多代雏形产品,在模拟环境及少量志愿者试用场景下反复测试,不断优化结构设计、传感器选型与布局,解决诸如信号干扰、灵敏度不均、耐用性不足等系列问题。
- 技术整合与优化阶段([起始时间区间 3]):随着关键技术难点逐步攻克,团队聚焦于将感知系统、控制系统、驱动系统等各模块进行高效整合,开发专用算法实现触觉信号快速处理与精准识别,让仿生手能够实时、准确地模拟人体手部触觉反馈,并与大脑指令顺畅交互,至此全触觉仿生手逐步走向成熟。
核心技术亮点
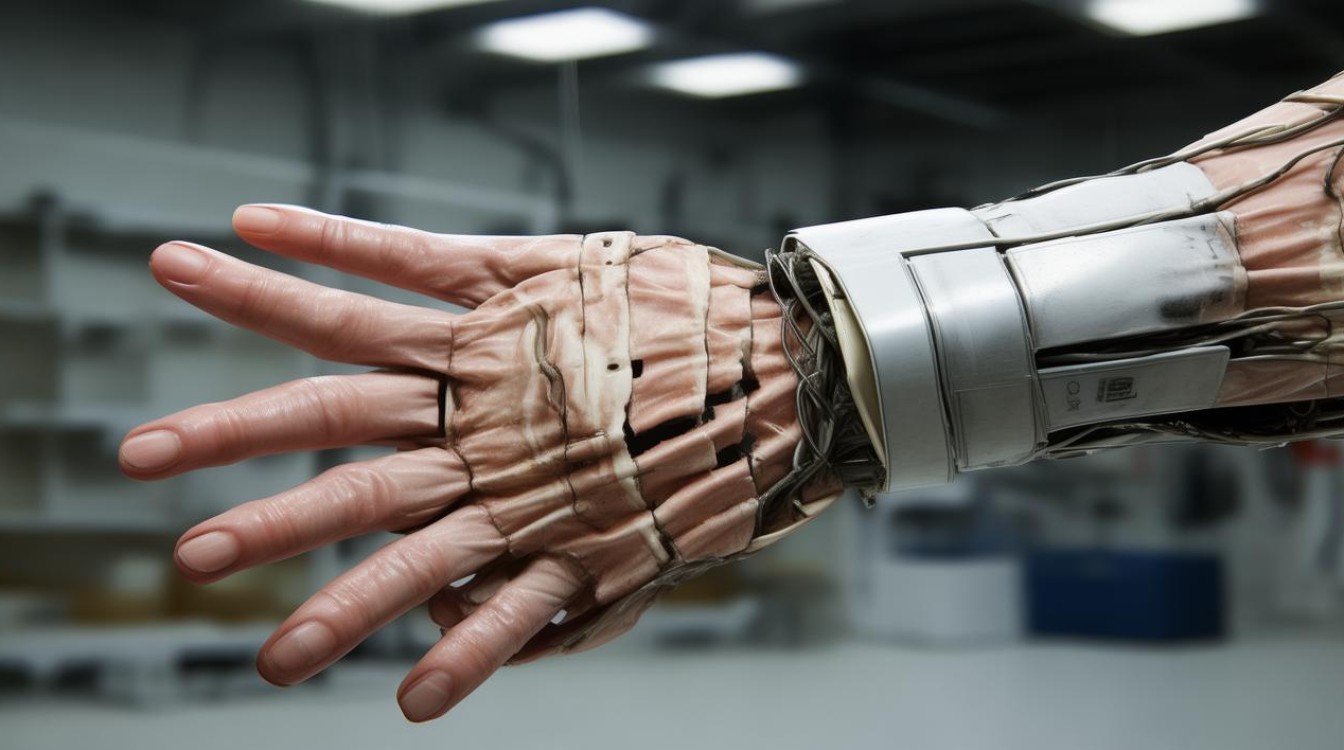
(一)仿生材料创新
- 柔性皮肤材质:选用具有高弹性、高韧性且生物相容性良好的高分子聚合物材料,其杨氏模量、断裂伸长率等物理参数经精确调控,贴近人体皮肤力学性能,不仅能有效感知轻微触碰,还能适应复杂形变,为触觉感知提供基础载体。
- 智能感应涂层:在材料表面涂覆一层兼具压敏、热敏特性的纳米复合薄膜,该薄膜由特殊工艺制备,厚度极薄却能敏锐感知压力变化与温度波动,将外界物理***迅速转化为电信号,实现多模态触觉信息采集。
(二)精密传感网络
- 高密度传感器布局:仿照人体手部触觉感受器分布密度与位置,在仿生手指尖、掌心、掌背等关键部位密集排布各类微型传感器,压力传感器可精细分辨毫牛顿级别压力差异,温度传感器能精准感知数摄氏度温差,构建起无死角、高分辨率的触觉传感矩阵。
- 信号同步与融合技术:为确保各传感器所采集信号能准确反映真实触觉情境,研发团队开发出先进信号同步技术,消除传输延迟与相位偏差,同时运用机器学习算法对多源信号进行融合处理,让仿生手能像人体手部一样综合判断物体软硬、冷热、纹理等复合触觉特征。
(三)智能控制系统
- 神经接口适配:深入研究人体上肢神经信号传输编码规则,设计出与之匹配的高精度神经接口,将残肢端微弱神经电信号高效接收并转化为数字指令,实现对仿生手动作的精准操控,无论是抓握、捻捏还是触摸细微物件,皆能响应自如。
- 实时反馈算法:基于采集的触觉信息,控制系统内置实时反馈算法,能在极短时间内将触觉感受以电***形式回传至残肢神经末梢,让使用者产生仿佛真手触摸的直观体验,形成动作指令与触觉反馈的闭环控制回路,大幅提升操作精准度与手部操控灵活性。
性能测试与应用场景展示
(一)严格性能测试
- 实验室基准测试:在专业实验室环境下,仿生手接受多轮严苛测试,包括不同频率、力度的机械冲击测试,模拟极端温湿度环境的耐受性测试,以及长时间连续工作的疲劳测试等,测试数据表明,其触觉灵敏度较传统假肢提升数倍,信号传输稳定性高达[X]%,正常使用寿命预计可达[时长年限],各项指标均达到甚至超越研发预期。
- 临床试用反馈:选取多名不同年龄段、伤残程度的志愿者进行长期临床试用,医护人员与科研团队密切跟踪记录,结果显示,患者在日常生活场景如穿衣、进食、写字等方面操作成功率显著提升,其中抓握物体成功率从初期的[X]%逐步提高至[X]%以上,患者对仿生手触觉反馈满意度平均达到[高分值],充分验证产品实用性与有效性。
(二)多元应用场景
- 医疗康复领域:为截肢患者提供接近真实的触觉康复训练工具,帮助重建手部感觉运动协调能力,加速康复进程;同时辅助医生进行更精准的神经功能评估,依循患者触觉恢复情况制定个性化治疗方案。
- 智能机器人行业:赋予服务机器人、工业机器人类似人类手部的细腻触觉,使其在复杂操作任务如精密仪器装配、脆弱物品抓取整理时能轻柔、精准作业,避免因过度用力或误判物体属性造成损坏,拓宽机器人应用范围与智能化水平。
- 虚拟现实/增强现实(VR/AR):作为沉浸式体验关键输入设备,全触觉仿生手能让使用者在虚拟环境中真切感受物体质感、重量等细节,极大增强交互真实感,为游戏娱乐、虚拟培训等场景带来革新体验,例如在虚拟手术模拟中,医生可凭借仿生手触觉精准操控虚拟器械,提升训练效果。
未来展望与挑战
(一)技术持续升级方向
- 仿生肌腱与肌肉研发:进一步模仿人体肌肉骨骼协同工作原理,开发具备自主驱动能力的仿生肌腱与人工肌肉组织,使仿生手动作更加流畅自然、力量控制更精细,减少对外部动力源依赖,提升整体能效与机动性。
- 脑机接口深度优化:深化脑机接口技术研究,提高神经信号解码精度与速度,实现更多复杂手部动作意图精准识别,让使用者仅凭意念就能自如操控仿生手完成精细操作,突破现有操作指令局限,真正实现“心手相连”。
(二)面临挑战剖析
- 成本效益平衡:当前研发涉及大量高端材料、精密制造工艺以及前沿技术研发成本,致使全触觉仿生手造价高昂,难以大规模普及,后续需通过技术创新降低成本,如优化材料合成工艺、探索量产化生产模式等,同时寻求医保政策支持、社会公益援助等多元资金渠道分担患者经济压力。
- 生物兼容性提升:尽管材料已具良好生物相容性,但长期植入人体后仍可能引发轻微免疫反应或组织排异,影响使用安全性与寿命,未来需持续改进材料表面特性,强化与人体组织整合能力,确保仿生手在体内长期稳定、安全运行。
- 伦理法律规范:随着仿生手智能化程度提升,涉及隐私保护、责任界定等伦理法律问题日益凸显,例如脑机接口数据安全存储与使用、仿生手操作致损赔偿责任划分等,需要联合法学、伦理学专家制定完善相关法规标准,保障技术研发与应用在合法合规轨道前行。
相关问题与解答
问题 1:全触觉仿生手如何确保在不同环境下都能稳定准确地感知触觉信息?
解答:在材料选择上,采用的高弹性、高韧性且适应多种环境条件的高分子聚合物材料,搭配智能感应涂层,使其能在较大温湿度范围、不同压力场景下稳定工作,从技术层面看,精密传感网络通过高密度布局且经过校准的传感器,配合先进的信号同步与融合技术,有效过滤环境噪声干扰,无论外界是潮湿、干燥、高温、低温环境,亦或是遭遇不同程度外力冲击,都能精准采集触觉信息并转化为可靠电信号,再经智能控制系统处理,保障仿生手稳定准确地感知各类触觉特征。
问题 2:对于儿童截肢患者,全触觉仿生手的研发应用有哪些特殊考量与适配措施?
解答:针对儿童截肢患者,首先要考虑其身体发育特点,仿生手尺寸设计需具备可调节或模块化拓展功能,以便随孩子肢体成长适时调整,在材料方面,更加注重无毒无害、轻量化且易于清洁消毒,防止对孩子娇嫩肌肤造成***或感染风险,神经系统适配上,鉴于儿童神经再生与塑形能力强,研发更温和、精准的神经接口与适配算法,便于孩子快速建立与仿生手的操作关联,同时结合儿童行为心理特征,优化外观设计使其更易被接受,助力儿童健康成长并融入正常生活学习场景。
北京大学研发的全触觉仿生手作为一项具有开创性的科研成果,在技术突破、
版权声明:本文由环云手机汇 - 聚焦全球新机与行业动态!发布,如需转载请注明出处。








 冀ICP备2021017634号-5
冀ICP备2021017634号-5
 冀公网安备13062802000102号
冀公网安备13062802000102号